�༉Deltaʽ���۴��콛���ʹ�ߴ�3D��ӡ�C
|
Deltaʽ���Cе�����@��һ�Nͨ�^һϵ�л����B�ӵ�ƽ����߅������Ŀ����X��Y��Z�S�ϵ��\�ӵęCе�Y����������@�N�Cе�Y���đ�������V�����e���������m���MС���g��������������Ч������������ �@�N�Y������������ʿ��ɣ�����WԺ��EPFL����Reymond Clavel�����������o80����l���ġ������Deltaʽ���Cе����Ҫ�Á��OӋһ�N���Ժܿ��ٶȲ����pС���w�ęC���ˡ�1987����ʿDemaurex��˾����ُ�I��delta�C���˵�֪�R�a�ಢ����a�I������Ҫ�����ɿ�����ɡ������ʳƷ���b�� �������Ӳ����ܛ�����̵İlչ�����ļ��g������ɱ��½����ܶ��������OӋ�Լ���3D��ӡ�C�ǽ��b���@�NDelta��ʽ�Cе�۵����c�����Ǿͳ��F������҂���Ҋ�����νӽ����������w��Deltaʽ3D��ӡ�C�� ���ǣ��@�NDeltaʽ�Cе��ԭ���ͱ��OӋ��ֻ���ڪMС�Ŀ��g�﹤�����䑪�÷������ܵ������ơ����˽�Q�@�����}�����գ�������ܛ���͙C늮aƷ�_�l�� Aad van der Geest��ԭ�е�Deltaʽ�Cе�۵Ļ��A�ϣ��_�l��һ�N����Deltaʽ�Cе����Multi-Delta Robotic Arm����ʹ���ӿ��g������ӣ��s�]��������������
�Ă��y��Deltaʽ�C����ԭ�����l��van der Geest������Deltaʽ�Cе���B�������������^�صIJ����O���B�������ϡ����_�l��������6Ӣ�磨�s15���ף�����12Ӣ�ߣ��s3.6�ף��ߵ�ԭ���O��֮������K�ҵ���һ���܉�����ɔy���������p�����Cе�۵Ľ�Q������ ����ʹ����Ч�ع�����van der Geest���O����Ϸ��OӋ��һ��������v�C���͈��п����b�õĻ��������@���������l��������������P���ıۣ����B�ӵ�һ�������ε�ƽ�_�ϣ�Ȼ���@�N�Y���ɷ��ͯB�ӣ�ֱ���_���A���IJ����߶ȡ�
��錍�H�������ɻ����cһ��ؓ���P��֧��ϵ�y��ͬ��ɵģ������@Щ�Cе�ۿ��Բ���һЩ�p�|�������죨������3D��ӡ�C��ӡ�������������@�N�b�õ��ƄӑT�Ժ�С�����Ԍ��F�ܿ�ļ��ٶȺ��Ƅ��ٶȡ����⣬�@�N�OӋ��������Ƙ����ij����OӋ�������@Щ�B�ӽM���܉��ڲ�����������ǰ�������ӄ��Ⱥ�ؓ�ɏ��ȡ�
�M��߀�]�й������@�N�OӋ����ʲô�ӵĮaƷ�����M/���I��;����van der Geest���ڇLԇ��������һ�_�����Ե�3D��ӡ�C�����ғ��Ї�3D��ӡ�W�˽⣬��K��3D��ӡ�C�OӋ���߂��ߴ��3D��ӡ�����������ӡ�ճ������ΰ�ʣ������҃r���c���y������3D��ӡ�C���Ҳ���и�����,ͬ�r�@�N3D��ӡ�CҲ����ռ���ܴ�Ŀ��g��
|







(؟�ξ���admin)
 3D��ӡ�S������˂��ӛ
3D��ӡ�S������˂��ӛ �����@�G��3D��ӡ�����w��
�����@�G��3D��ӡ�����w�� ȫ��PK 3D��ӡPPSU��SOLVA
ȫ��PK 3D��ӡPPSU��SOLVA ��3D��ӡ�Ԅӻ���Ԫ�����
��3D��ӡ�Ԅӻ���Ԫ����� ���߾�����ӽY�����aƷ
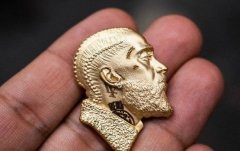
���߾�����ӽY�����aƷ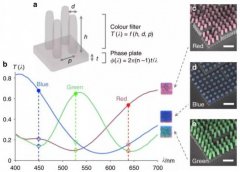 ���ͷ��μ��g��ͬһ������
���ͷ��μ��g��ͬһ������- ��3D��ӡ�S������˂��ӛ�f������Nips
- �������@�G��3D��ӡ�����w�б���
- ��ȫ��PK 3D��ӡPPSU��SOLVAY �l��2019��
- ��MetGala2019��3D��ӡ�Ƴɵ�ȹ�ӣ�����
- ����3D��ӡ�Ԅӻ���Ԫ�������܇�����I��
- �����߾�����ӽY�����aƷ��Ҏģ����
- �����ͷ��μ��g��ͬһ���������������ͬ
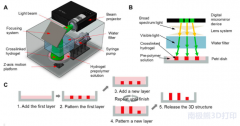
- �����ڼ���3D��ӡ�Ŀ�Ҋ�⽻ˮ���z
- ��3D��ӡ����o�U������
- ���������^���� 3D��ӡ������ȫ��ҕ�X
 ���ڼ���3D��ӡ��
���ڼ���3D��ӡ��

