�K�Y��׃�ɬF�������ÿ�׃��Һ�B���ټ{�����ӌ��F 4D��ӡ���ܛ�C����
�������ܛ�C���˼��g����һ��Ѹ�ٔUչ��ǰ���о��I����d��������Ȼ������ܛ������\�әC���м�ȡ�`�У��Ԍ��Fƽ���͏��s���\�ӣ��m���ڸ��N���á�Ȼ�������ڲ����x������ƺ͂��y���췽���漰�ď��s�ಽ�E�^�̣�������л�ϽY����ܛ�C������Ȼ���R����

���b�ڴˣ����Ĵ�������ʿ�m��W��Ruirui Qiao�ȈF�������һ�N�·f��ֱ��һ��ʽ�������죨3D��ӡ��������������������ܛ�̈́��ԽM���M�ɵĻ�ϙC���ˣ�����ɏ��s���΄ա�
����Ҫ�c��
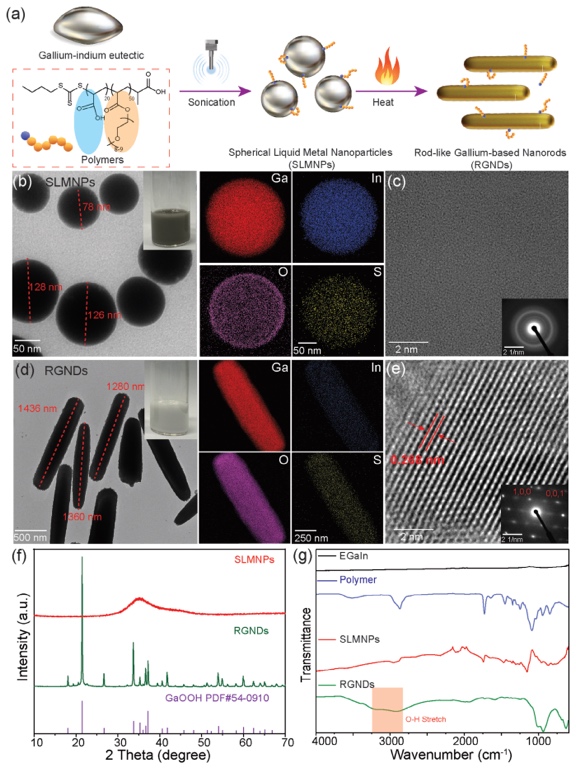
��1���ܵ���׃��Һ�B���ټ{���w����LMNPs���Ć��l��ͨ�^����ͬ�Π��扻��{���w����GNPs�����ϵ�3D��ӡ�ۺ����У��_�l��һ�����п��{�Cе���ܺͿ�׃���ԵĹ��ܲ��Ϲ��߰���
��2��Ȼ��ͨ�^һ�N���䷽��GNPs����īˮ��չʾ�˽M�b��һ�wʽ���ܛ-Ӳ�C���˵�ֱ�Ӵ�ӡ����3���@�N���췽���܉��ڙC�������w�Ļ�ϽY���о��_���ƙCе���ܺ��Π�ӛ�����ԣ������ƽY���OӋ��ͨ�^�OӋ����������߾��ȊA�����������R�_���ֲ������b�õĻ�ϙC���ˣ��Mһ��չʾ�������Ĺ��ܡ�
����Դ��https://doi.org/10.1002/adma.202409789
��Դ��EFL����3D��ӡ�c��������
(؟�ξ���admin)
 ���ɱ�����5000��Ԫ������
���ɱ�����5000��Ԫ������ ���ΙC�������U�Ј���
���ΙC�������U�Ј���  �ܲ����������֡������ȡ�
�ܲ����������֡������ȡ� 50��һ�����ȣ���������ɯ
50��һ�����ȣ���������ɯ ȫ����șC�������ࣺ
ȫ����șC�������ࣺ![���ҷQδ��C����������������ӣ�������������S����ȫ�]���}](http://www.changeyou.cn/uploads/allimg/250327/0S4492O4-0.jpg) ���ҷQδ��C�����������
���ҷQδ��C�����������- �����ɱ�����5000��Ԫ�����ݴ�W�_Դ3D��
- �����ΙC�������U�Ј��� ȫ���F��C��
- ���ܲ����������֡������ȡ���������ΙC
- �����ΙC���ˡ������M������δ��·�ںη�
- ��50��һ�����ȣ���������ɯ��һ�I����
- ��ȫ����șC�������ࣺ֧�ֳ����
- �����ҷQδ��C����������������ӣ����
- ���ɴ��^�����ϵK������Һ�w����һ��ܛ�w
- ��Sculpteo�Ƴ�PA12 Blue��һ�N����ʳƷ
- ��������Ĵ�W���ң�DeepSeek�ȳ��F��
- ���S�ʄף��Ђ��C���ˉ�
- ������������Q�������ΙC���˳ɱ����y�}
- ����ذl���C���ˮa�I�lչ֧������
- ���ձ�����С�C���˺������ď���C����
- ���ؑc�����M�о������ܙC���ˮa�I�lչ�F
- �����ΙC���˻��ˣ��C���ܼ��Є�
- �����������R�C���ˣ������C�����
- ����չ���È��������ΙC���˼����̘I��
- �����������š���һ���_�ʴ_��Ф���~�ij�
- ����δ��㰐��ľ�˼����һ���_�ʴ_��Ф��


