�������ⷽ�������ⲩ����3D��ӡ��������ȫ������܇
2025��7��28�գ�Ӣ�����̎���YouTuber����ղķ˹·�����D��James Bruton������3D��ӡ�������X�Ͳĺ���ƽ�����ϵ�y���Ƴ���һ�vȫ������܇���@������܇���OӋ���c�ǰ��b�˃ɂ���90�ȽǷ��õ�ȫ��݆���܉������ⷽ��������ֱ�ӂ����Ƅӡ�Ŀǰ�������ѽ��_Դ���@���Ŀ��

����܇�ĵױP����4040 T�Ͳ��X�Ͳ��Ƴɣ�ͨ�^�Aб֧�ܺ�ֱ��֧���M���B�ӣ�ǰ�����ڹ̶����õęC���˲�ܽM�����t֧����Ƥ�����ӵ�늙C��܇�S֧�ܺ͂���ϵ�yƤ��݆��LulzBot 3D��ӡ�C������ɡ������Dʹ��1.2���ć����ӡ���ͽY���������Լӿ옋���ٶȡ��Y������������ polymaker ��˾�� PolyMax PLA ���ϣ�������O���⚤�tʹ���� PolyLite Pro ���ġ����ڴ�ӡ�C��ӡ���ijߴ����ƣ���݆݆ݞ�����z�ϰ�������
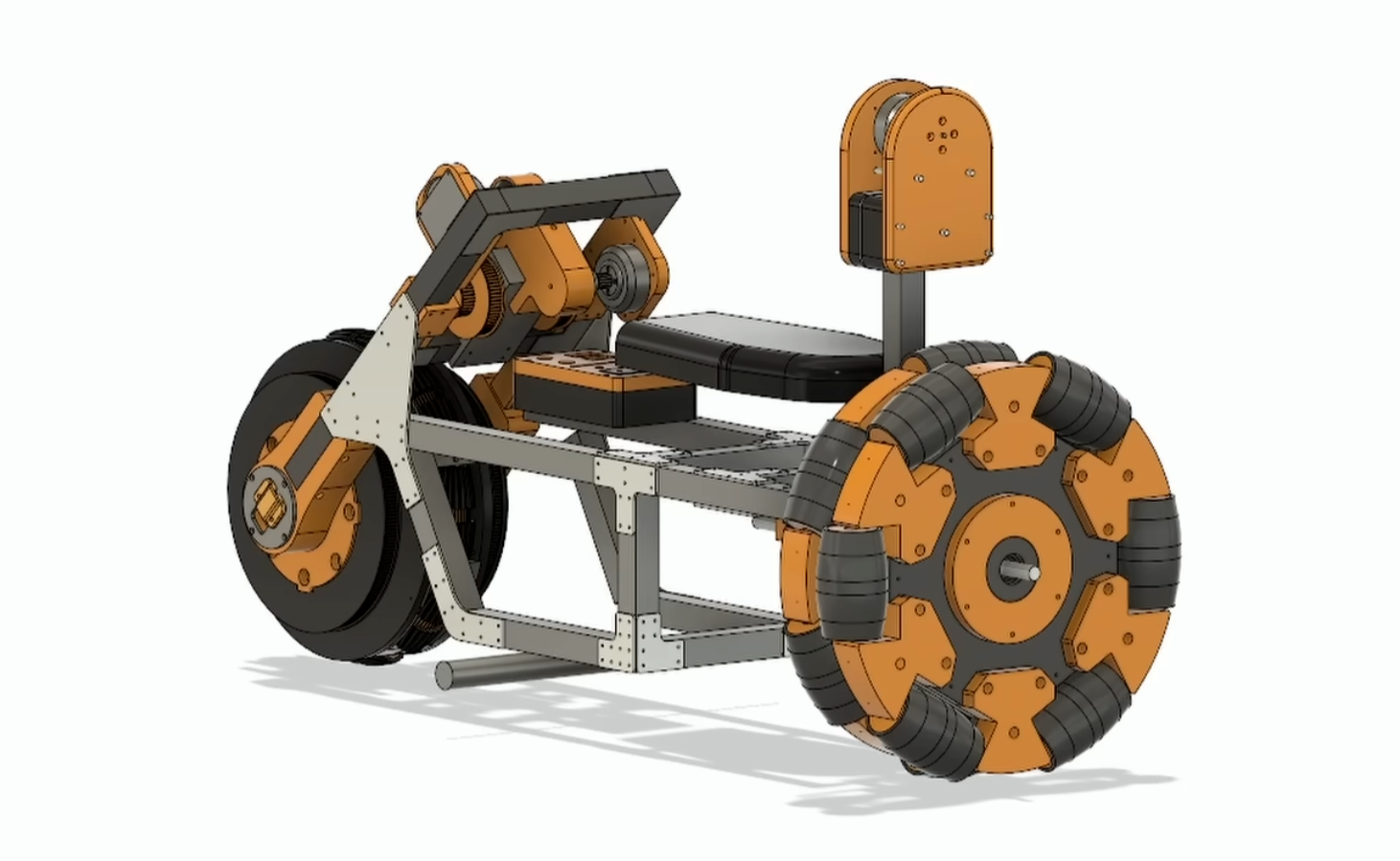
����ϵ�y����һ���ɼ�Ƥ���p��ϵ�y����һ��ͨ�^���gƤ��݆���F3:1��Ť���������S��ͨ�^HTD8��Ƥ���B�ӵ���݆�ϵĴ�����KƤ��݆������ϵ�y�Ɇ�ODrive S1�ŷ�늙C���ṩ������ODrive��һ�Ҍ�ע���_Դ늙C�������Ĺ�˾�����ṩ�ğoˢ늙C�;��a���M����ݔ�����_2ǧ�ߵĹ��ʡ�ͨ�^�����ͲĿ�ܻ���늙C֧�ܣ���ʹ�Î�֧�ε��X����Թ̶������{��ϵ�y�ď�����
PID����������BNO086�T�Ԝy����Ԫ�Ĕ���������ƽ�⡣Teensy 4������̎��ȃA���������������{��܇݆Ť�ء�����������b�м�ͣ���o�����Ӱ��o��늉��Oҕ�����{�b�ú����ڷ�����ˮƽ�x��һ��500����Ľ��|�����ڸ��x늙C�Դ���ɽM6S䇾ۺ���늳ش�����늙C�����ṩ50��늉������o��ϵ�y�ṩ12��늉���

�M�b�õ�܇��
�����D�Ãɂ����S�ٿv�Uȡ����֮ǰ���D��ݔ��ϵ�y�����ֲٿv�U����ǰ�M�����˺͂����Ƅӡ����ֲٿv�U�������D��ģ�M��̖ͨ�^һ����ͨ�^�������o�{����ƽ���V�����M��̎����ʹ�����_�ٿv�U�r�܉F��u�p�١������D�l�F��ԓ�V����ͨ�^�p��ݔ���ͻȻ׃�����������T���w
�ٿv�Uݔ�����׃PID���������O���c��ԓ�O���cĬ�Jֵ��0°������ֱ��ƽ���B���{���@���O���c����ʹ����܇�ڃAб��ͬ�r�Ƅӣ�������T�����D���r���w�Aб�ķ�ʽ�������Dͨ�^����ԇPID�����M�����{�������˷e��헣��Դ_���L�r�g�ăAб�Ƕ���ʹ늙C������������ʹ������С����У�����Ԝp�ٳ��{����ʎ��
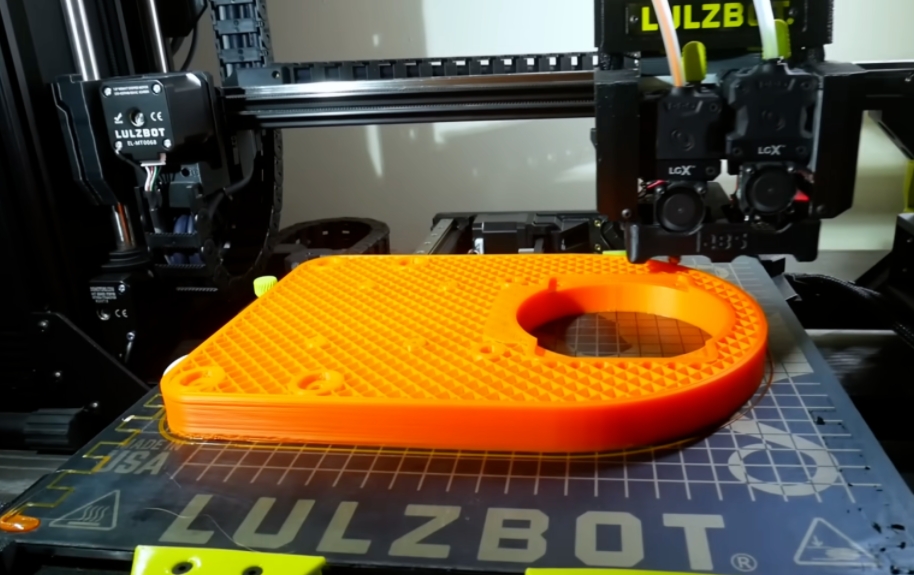
LulzBot 3D��ӡ�C���������㲿��
�����yԇ�������H����ȫ��݆�Ϳ��Է���܇�ܡ����ɂ�܇݆�����ӕr������܇�܉Fȫ���Ƅӡ�Ȼ�����D��r��¶����Ť�ز�ƽ��Ć��}����݆�a�������D�����@�����^С��ǰ݆���������D�Lԇԭ�����D�r���ױP��ؓ�d�°l���Aб������ǰ݆�^��У����ʹ܇�ܲ����������ˏ��a�@һ���}�������c�A���D�������෴��һ�ȃAб���Ե����ױP��Ť�ء�
���˺������ƣ������D������܇�������Þ�ɷ����T�С������ٿv�U�ӿڰ��b�ں�����˲ٿv�U��ӳ�䡣�@��һ���������w��λ�ڸ���ĺ�݆�Ϸ���Ť�ظɔ_�pС���D��푑��õ����ơ�“�F�����D�������……ֻ�賯����ȥ�ķ���Aб�����ܳ��l�ˣ�”�����{�����Ʒ�ʽ���ʾ��
�M���ڙCе����ȡ���˳ɹ�����ϵ�y�Դ��ھ����ԡ�ǰ݆�ϵ�С�L݆��Ҫ���������ʹ�ڟoؓ�d��r�£�50��늉���Ҳ��Ҫ�s20���ࣩ���@������Ч�ʡ���݆늙C�ṩ��Ť�س��^��ǰ݆�����a���ķ������@�����˸����µ�ƽ�����D�������D�l�F�������T�Еr����Ч�����ã�������������c���ʸ����܇݆���R��
�����Ŀ�ļ�������CAD�OӋ�Ϳ��ƹ̼���������GitHub�ϫ@ȡ��https://github.com/XRobots/TwoOmniWheelBike��
(؟�ξ���admin)
��һƪ����̫����C��HorizonͿ��3D��ӡ��������ECSS�Ś�˜�
 ���R�D��W�����о�����3D
���R�D��W�����о�����3D ��̫����C��HorizonͿ��3
��̫����C��HorizonͿ��3 3D��ӡ��ܛ���Vϵ�خ����p
3D��ӡ��ܛ���Vϵ�خ����p ORNL�cJuggerBot 3D�����_
ORNL�cJuggerBot 3D�����_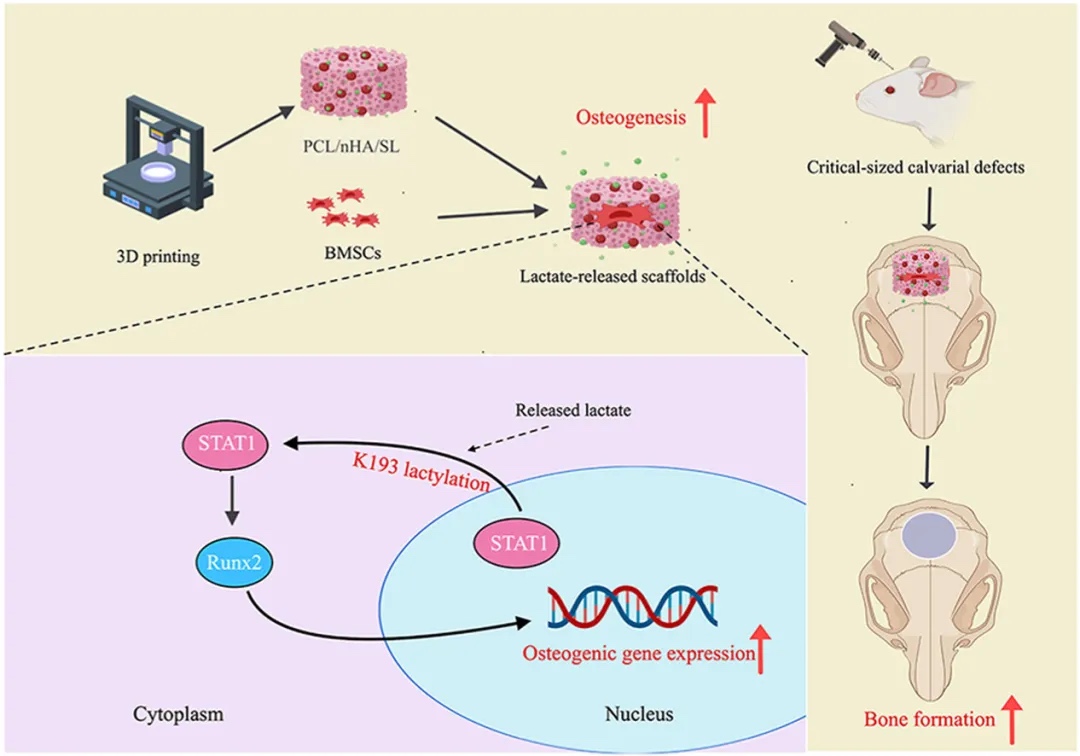 ���ϴ�W�w�����Ṧ��
���ϴ�W�w�����Ṧ��- �����R�D��W�����о�����3D��ӡ����D��
- ����̫����C��HorizonͿ��3D��ӡ������
- ���������ⷽ�������ⲩ����3D��ӡ��
- ��3D��ӡ��ܛ���Vϵ�خ����p��֧�������P
- ��ORNL�cJuggerBot 3D�����_�l����w��3D
- �����ϴ�W�w�����Ṧ�ܻ�3D��ӡPCL/
- �����Ҕ��ֻ��OӋ�c���섓�����İl���B�m
- ��������ī3D��ӡ���g�F��|����̩��
- �����������_�������t����3D��ӡ���g�ڹ�
- ������܊��һ�������̰��bDED����3D��ӡ
 ͻ��������3D��ӡ
ͻ��������3D��ӡ �ϰ�LEAP 71��˾
�ϰ�LEAP 71��˾ 3D�����ӡ������
3D�����ӡ������ ��Small Science
��Small Science ��������-�����
��������-����� ���A��W��������
���A��W��������- ���������ӌW����ܵ���������TC4��ˇ��
- ���p���Ӿۺϡ��߾��������I��ġ����ǡ�
- ��3D��ӡ����Y���OӋ�K�Oָ�ϣ������p��
- ���C���������·���3D��ӡ���g
- ��3D�����ӡ���g����������ٹ����е���
- ���B�m�����̼��g����ͻ�ƣ�Carbon����
- ���u݆�~Ƭ�����������������ޏͼ��g����
- ���Gɫ�ְ�ȫ��3D��ӡ�zԭˮ���z���IJ���
- ���P�c2024��ʮƪ�l����Science��Nature
- ��⁏��ˣ��K����3D��ӡ⁺Ͻ��q朣��b��


