늘O����4D��ӡ�x��ˮ���z�Π�׃�Σ������������P�Iͻ��
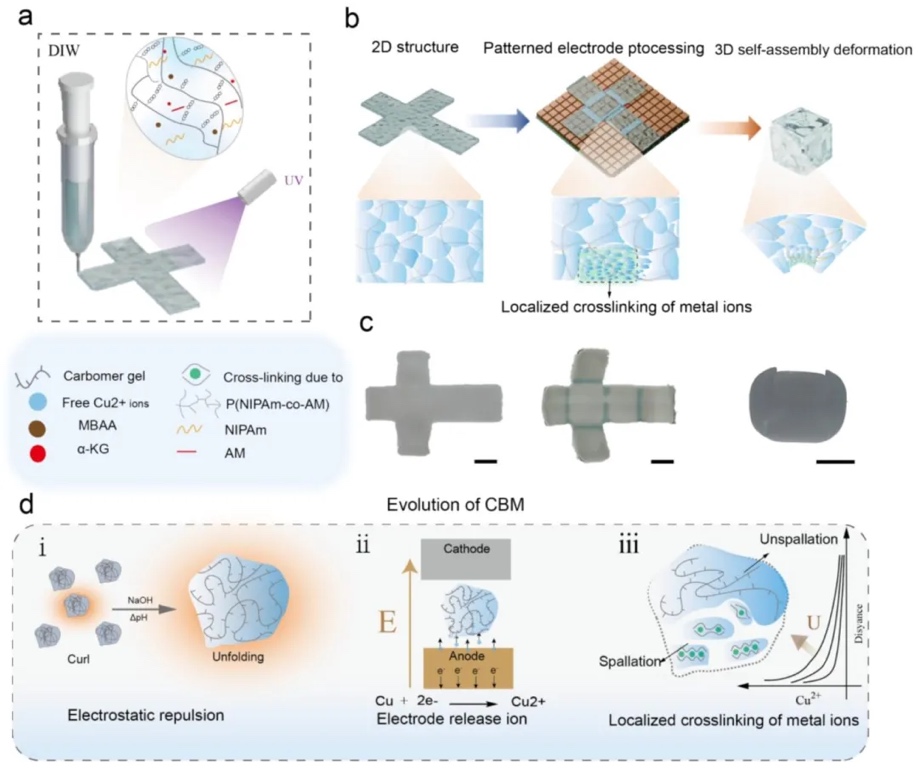
��ǰ���̼�푑�ˮ���z����и���ͬ���w�e׃������ܛ�������������R���ܾ��ޣ����y�p�ӽY�����Ӿ���e������ģ�ȷ������ڷDZ�Ҫ�Ӻͷֱ��ʲ���Ȇ��}�����ִ�W��ѩ������c��������ڈF����늘O����4D��ӡ���ԣ�ͨ�^ȫ���g���;ֲ�����C�ƣ��ڟ�푑�ˮ���z�Ќ��F���g�ɾ����ӡ��Fꠌ�����ķ���z�����(N-��������ϩ����-��-��ϩ����)���|������ȫ�֟�푑����Y�ψD����늘OጷŽ����x�ӣ���Cu²⁺������Ŀ�˅^�����R����Һ�ض�Ч�������F�߷ֱ��ʸ�����׃�Ρ�ԓ�����Ƃ��ˮ���z������ģ�Mֲ���횏�����ˮĸ���M�������О飬߀�����ڟ�푑��y�T�ͷ���ܛ�C���ˡ����P������“Electrode-integrated 4D printing enables hydrogel shape morphing: A critical breakthrough for bio-inspired actuators”���}�l���ڡ�Chemical Engineering Journal���ϡ�
�о�Ҫ�c
1. 늘O����4D��ӡ���ԣ�ͨ�^ȫ���g���;ֲ�������F��푑�ˮ���z���g�ɾ����ӡ�
2. �����wϵ�OӋ������ķ���z�cP(NIPAM-co-AAM)���|�Y�ϣ�����ȫ�֟�푑���
3. �ֲ�����C�ƣ�늘OጷŽ����x�ӣ���Cu²⁺��������Ŀ�˅^��LCSTЧ�������F anisotropic׃�Ρ�
4. 늘O����Ӱ푣����ȡ�늉��ȅ����{��׃�Σ�3mm���ȡ�10V늉��郞���l����
5. ����l������ģ�Mֲ���횡�ˮĸ���\�ӣ����F2D��3D�Π��D�Q��
6. ���H���ð������Ƃ��푑��y�T������ܛ�C���ˣ���C�����w���ƺ��Ƅӈ������á�
����Դ��
https://doi.org/10.1016/j.cej.2025.165268
(؟�ξ���admin)
��һƪ��Polymaker��Ʒ��Fiberon PPS-GF20���I�ߜؑ���
 �����о��ˆT�_�l�µ��w�e
�����о��ˆT�_�l�µ��w�e �ʼ�ī����������W���̎�
�ʼ�ī����������W���̎� Polymaker��Ʒ��Fiberon P
Polymaker��Ʒ��Fiberon P ���R�D��W�����о�����3D
���R�D��W�����о�����3D ��̫����C��HorizonͿ��3
��̫����C��HorizonͿ��3- �������о��ˆT�_�l�µ��w�e3D��ӡͶӰ��
- ���ʼ�ī����������W���̎��_�l����3D��
- ��Polymaker��Ʒ��Fiberon PPS-GF20����
- ��늘O����4D��ӡ�x��ˮ���z�Π�׃�Σ���
- �����R�D��W�����о�����3D��ӡ����D��
- ����̫����C��HorizonͿ��3D��ӡ������
- ���������ⷽ�������ⲩ����3D��ӡ��
- ��3D��ӡ��ܛ���Vϵ�خ����p��֧�������P
- ��ORNL�cJuggerBot 3D�����_�l����w��3D
- �����ϴ�W�w�����Ṧ�ܻ�3D��ӡPCL/
 ͻ��������3D��ӡ
ͻ��������3D��ӡ �ϰ�LEAP 71��˾
�ϰ�LEAP 71��˾ 3D�����ӡ������
3D�����ӡ������ ��Small Science
��Small Science ��������-�����
��������-����� ���A��W��������
���A��W��������- ���������ӌW����ܵ���������TC4��ˇ��
- ���p���Ӿۺϡ��߾��������I��ġ����ǡ�
- ��3D��ӡ����Y���OӋ�K�Oָ�ϣ������p��
- ���C���������·���3D��ӡ���g
- ��3D�����ӡ���g����������ٹ����е���
- ���B�m�����̼��g����ͻ�ƣ�Carbon����
- ���u݆�~Ƭ�����������������ޏͼ��g����
- ���Gɫ�ְ�ȫ��3D��ӡ�zԭˮ���z���IJ���
- ���P�c2024��ʮƪ�l����Science��Nature
- ��⁏��ˣ��K����3D��ӡ⁺Ͻ��q朣��b��


